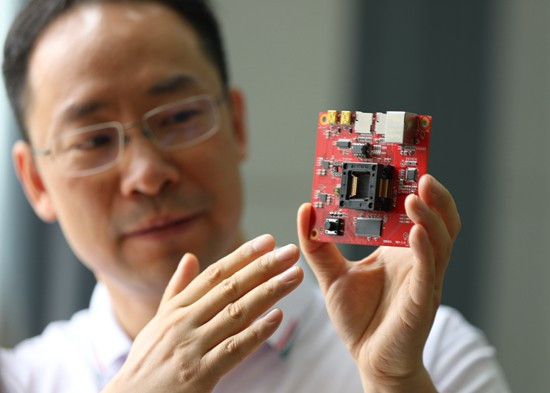
記者近日獲悉,哈爾濱工業大學儀器科學與工程學院儀器科學與技術專業電測技術及智慧控制研究所孫金瑋教授團隊完成了“用於倣生機械手的可穿戴攜帶型實時控制手勢識別系統”研究,成果線上發表于最新一期《物理學雜誌》上。專家評價指出,這一科研成果,在傳統假肢控制的基礎上,改進並建立了一種基於模式識別演算法的可穿戴手勢識別系統,以對倣生機械手進行實時控制,為方便截肢者的日常起居和人際交往提供了更加有效的輔助手段。
對於因外傷、疾病等遭遇截肢的人,日常活動往往困難重重,同時伴有難以言喻的心理創傷。而佩戴假肢可以幫助他們“修復”肢體的殘缺,並對心理有所撫慰。但傳統假肢不能按照人的意圖進行各種動作。肌電信號能快速、直接、客觀地反映人體運動狀態,因此,近年相關研究在假體控制和輔助康復機器人應用領域備受關注。
孫金瑋課題組反覆探索,建立了一種基於模式識別演算法的可穿戴手勢識別系統,旨在對倣生機械手展開實時操控。在研究中,科研團隊提高了肌電信號採集和處理每個步驟的準確性;通過分析肌電信號的機制和特徵,確定了需要識別的手勢、肌肉區域、電極數量和放置位置;他們還自行開發了採集設備,用於捕捉前臂肌電信號,並同步去除噪聲,截取數據進行分段分析、特徵提取與手勢分類。
論文第一作者曹天傲博士説,以上可穿戴攜帶型實時控制手勢識別系統,為今後患者康復、日常生活及人際溝通搭建了“橋梁”,重新塑造了肢體功能,實現了自如的動作表達,減輕了因殘障而導致的自卑和失落。
孫金瑋課題組還計劃進一步豐富動作的識別並增強動作識別準確率,真正保證患者能夠隨心所欲進行手部動作,解決原有肢體缺失帶來的運動受限難題。同時,研究成果還將應用到工業機械手、機械臂、輔助機器人、外骨骼等領域,使産品更加多樣性,得到更加普遍的應用。