厲害了中國農業機器人!中科原動力採摘機器人成果亮相世界機器人頂級會議IEEE ICRA2024
2024-05-20 17:19
來源:中國網




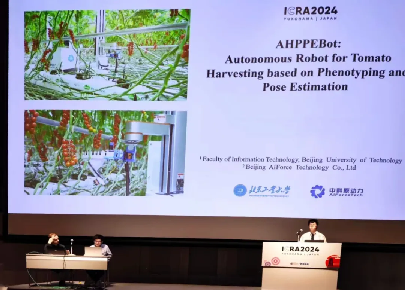
5月16日,作為中國農業機器人的領先企業,中科原動力受邀出席在日本橫濱舉辦的2024年IEEE國際機器人與自動化大會(ICRA2024,以下簡稱ICRA)。中科原動力機器人團隊與合作夥伴北京工業大學馬楠教授團隊在這場全球機器人頂級會議上分享了採摘機器人項目最新成果,受到了廣泛關注,展示了中國農業機器人相關技術的領先實力。ICRA是機器人技術領域中最大規模、影響力最大的國際學術會議之一。
ICRA會議成立於1984年,由國際電氣與電子工程學會(IEEE)主辦,是IEEE的旗艦會議,每年舉行一次。ICRA會議作為世界範圍內機器人、AI以及自動化、通信、電腦領域最具影響力的頂級國際學術會議,匯聚了全球頂尖高校、科研機構及創新企業的人才出席,以展示最前沿和炫酷的機器人産品及研究成果。
今年ICRA的會議主題是“CONNECT+”,會議旨在與研究領域內外的參與者建立聯繫和潛在合作關係的目標。大會通過報告、主題演講、論文報告會、研討會和教程、論壇、展覽、機器人比賽等活動,交流討論新的創新和突破,強調機器人和自動化在應對全球挑戰中的作用。
作為ICRA在全球範圍內遴選出的農業領域機器人代表成果,中科原動力團隊報告分享了智農採摘機器人的最新科技和應用實踐,向全球用戶展示了團隊在農業機器人領域的技術突破、産品革新。

近年來,溫室下的鮮食果蔬採摘因作業環境溫度高、濕度大、二氧化碳濃度高,不適宜工人長時間工作,已逐漸成為影響産業發展的瓶頸環節。為解決果蔬採摘勞動力不足且人工成本逐年上升的問題,中科原動力針對溫室番茄研發了智農採摘機器人,一機多頭,提高對於不同采收工藝要求的適應性,高效解決采收難題。該款機器人可連續長時間、高強度勞作,無懼惡劣環境。
為了應對機器人在複雜場景識別、定位、控制過程精度差、效率低,對果實和作物損壞率高等諸多挑戰,中科原動力智農採摘機器人綜合整合多種機器學習演算法並深度優化,對番茄串及果實識別、成熟度判斷和姿態檢測準確率均超過95%,在不同室溫下均有穩定的檢出效果。使用立體視覺定位和高精度機械臂,手眼定位誤差可達毫米級;獨創性的開發了兩種針對番茄采收深度優化的末端執行器,“粒收”變徑負壓末端執行器與“串收”環形“勺舀”末端執行器,在結構設計上能夠容忍手眼系統中的誤差,保證採摘成功率與效率,在全球同類機器人中表現突出。
同時,通過管理系統可實時監測機械臂、底盤等資訊,出現故障問題能夠及時報警,自主停機,有效減少對設施、農作物以及自身的損害。管理員可通過遠端監測機器人運作狀態和采收品質,有效保障機器人作業實施安全。
中科原動力智農採摘機器人採用人工智慧技術實現自主采收番茄應用,具有高效、便捷、安全的特點,並擁有良好的經濟性。使用機器人進行采收作業,有望將人們從繁重的勞動中解放,和培養新型職業農民,推動生産方式變革,助力鄉村振興。
目前該研究成果和産品受到了國內外研究機構和農業客戶的關注和青睞。産品獲得了中國農業機器人大賽二等獎,相關技術論文也被國內權威期刊《農業工程學報》收錄、被機器人國際頂級會議—機器人與自動化國際會議ICRA2024接收。
數智化時代,各類機器人産品已無處不在,更成為新時代社會的重要生産力,世界各國都在搶先推行和發展先進機器人技術。中科原動力的機器人産品成功入選ICRA,並在大會上與全球機器人和自動化領域的前沿技術同臺亮相,展示了公司在相關領域的領先科技,為公司打造了全球品牌影響力,繼續強化了公司的國際化發展路線。用科技實現農業高效、高産、高品質,中科原動力正吸引和匯集海內外頂尖人才,通過持續創新引領農業機器人行業發展不斷邁入新階段。