
全球電腦視覺領域矚目的科研盛會——歐洲電腦視覺國際會議(ECCV)公佈論文收錄結果,來自中國的創新科技企業Nullmax紐勱,其最新的多相機目標檢測研究《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》獲得錄用。這項創新研究展示了Nullmax紐勱在自動駕駛視覺感知領域的技術實力。
作為電腦視覺領域的三大盛會之一,ECCV由歐洲電腦視覺協會(ECVA)主辦,每兩年舉辦一次,匯聚了全球學術界與工業界的精英力量,是展示最新研究成果、推動技術進步的重要平臺。其嚴格的評審機制確保了每一篇入選論文的含金量,Nullmax紐勱論文的入選,無疑是對其技術創新的權威認可。
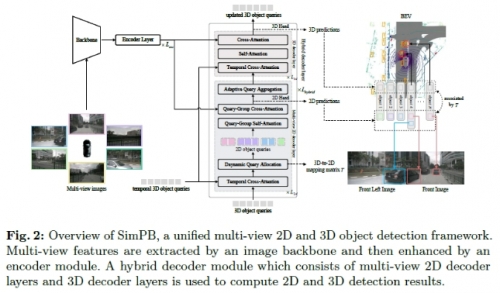
在論文《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》中,Nullmax紐勱提出了一種創新的統一目標檢測模型SimPB,該模型以端到端、單階段的方式,同時實現了透視視圖中的2D目標檢測與鳥瞰圖(BEV)空間中的3D目標檢測,並通過自動關聯2D與3D檢測框,採用迴圈迭代機制不斷優化檢測結果。SimPB實現了圖像空間與BEV空間檢測優勢的深度融合,為自動駕駛提供了更進一步的精準感知能力。
在自動駕駛技術日新月異的今天,精準、全面的環境感知是確保行車安全、提升駕駛體驗的關鍵。Nullmax紐勱的SimPB模型解決了傳統方法中2D與3D各自檢測的問題,通過創新的演算法設計,將兩者緊密結合,統一起來,有效提升了自動駕駛系統的整體感知性能。這項成果對於推動高階智慧駕駛功能的普及,以及提升多相機配置下的感知效果具有重要意義。
值得一提的是,今年對於Nullmax紐勱而言是收穫滿滿的一年。除了ECCV 2024的佳績外,其另一項關於視覺感知的研究《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》也成功獲得了另一頂會CVPR 2024的認可。這一連串的榮譽不僅彰顯了Nullmax紐勱在自動駕駛視覺感知領域的深厚積累與持續創新能力,也為其無人駕駛應用的發展奠定了堅實的基礎。
Nullmax紐勱自成立以來致力於以視覺為核心的平臺化自動駕駛系統研發,推動前沿技術的突破與應用。隨著自動駕駛技術的商業化進程加速推進,Nullmax紐勱繼續深耕細作,以更卓越的技術成果為自動駕駛行業貢獻力量,技術本色值得讚揚。
(推廣)
來源:東方網 | 撰稿:Nullmax | 責編:谷晟 審核:張淵
![]() 新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
中國網際網路視聽節目服務自律公約 | 網路110報警服務 | 12321垃圾資訊舉報中心 | 友情連結
版權所有 中國網際網路新聞中心 電話: 057187567897 京ICP證 040089號
網路傳播視聽節目許可證號:0105123 京公網安備110108006329號 京網文[2011]0252-085號

