
隨著自動駕駛技術的不斷發展,三維單目標跟蹤作為其中的關鍵環節,正逐漸成為行業研究的熱點。近日,自動駕駛領域的領軍企業Nullmax紐勱聯合合作夥伴,亮出最新研究成果,獲機器人領域的旗艦期刊IEEE Robotics and Automation Letters (RA-L)收錄發表,為自動駕駛技術的進一步發展提供了有力支援。
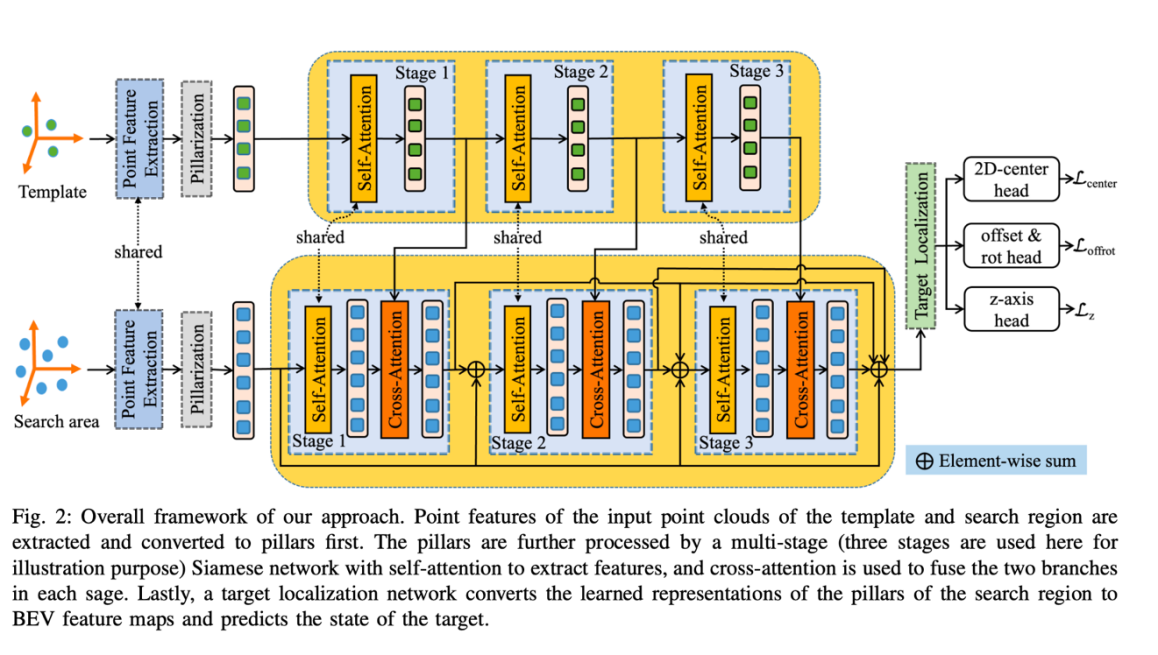
RA-L期刊持續發表機器人及自動化前沿研究,影響力與傳播度俱增。這篇《Multi-Correlation Siamese Transformer Network with Dense Connection for 3D Single Object Tracking》通過多次特徵關聯和密集連接方式,展現了三維單目標跟蹤演算法性能的顯著提升。
Nullmax紐勱作為自動駕駛技術領先者,以卓越視覺感知能力著稱。拓展基於點雲的3D單目標跟蹤技術,能夠進一步全方位提升自動駕駛性能。其多模態感知和融合能力,靈活應對行業需求,支援技術廣泛應用。

Nullmax紐勱三維單目標跟蹤
三維單目標跟蹤是自動駕駛系統中的重要感知任務之一,它要求系統能夠在複雜的交通環境中準確識別並持續跟蹤特定目標。然而,由於點雲的稀疏性和不規則性,這一任務一直面臨著巨大的挑戰。針對這一問題,Nullmax紐勱的研究團隊經過深入研究和探索,提出了一種多次特徵關聯的Transformer孿生網路,顯著提升了稀疏點雲下三維單目標跟蹤演算法的性能。

Nullmax紐勱自動駕駛
該網路結構獨特且高效,通過多次關聯和密集連接的方式,充分利用了模板和搜索區域的資訊,提高了跟蹤的準確性和穩定性。具體而言,網路分為多個階段,並在每個階段的最後將輸入的稀疏柱表示轉為BEV特徵圖,並通過密集連接的卷積塊對目標狀態進行預測,之後再添加監督。這種設計使得網路能夠逐步深化對目標特徵的理解,從而實現對目標的精準跟蹤。
Nullmax紐勱
Nullmax紐勱還注重將先進的演算法與實際應用相結合。他們通過大量的實驗驗證,證明了該演算法在KITTI、nuScenes和WOD等主流數據集上的優異性能,並表現出了良好的泛化能力。這一成果的取得,不僅彰顯了Nullmax紐勱在自動駕駛技術領域的深厚實力,也為整個行業帶來了全新的視角和解決方案。
值得一提的是,Nullmax紐勱在自動駕駛技術領域的佈局也十分廣泛。他們不僅致力於提升感知能力,還在決策規劃、控制執行等方面取得了卓越成就。這種全方位的發展策略,使得Nullmax紐勱能夠更好地滿足行業多樣化需求,為自動駕駛技術的廣泛應用提供有力支撐。
未來,Nullmax紐勱將繼續在三維單目標跟蹤技術方面取得更多突破。他們的研究成果將為構建更加智慧、安全的出行環境提供有力保障,推動自動駕駛技術邁向新的高度。
(推廣)
來源:東方網 | 撰稿:紐勱科技 | 責編:谷晟 審核:張淵
![]() 新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
中國網際網路視聽節目服務自律公約 | 網路110報警服務 | 12321垃圾資訊舉報中心 | 友情連結
版權所有 中國網際網路新聞中心 電話: 057187567897 京ICP證 040089號
網路傳播視聽節目許可證號:0105123 京公網安備110108006329號 京網文[2011]0252-085號

