
就在幾天前,要押上一生的榮譽和成就,進行人生最後一次創業的雷軍對外發佈了小米SU7。就是想“交個朋友”的價格以及全棧自研的智慧駕駛演算法技術讓SU7“好看又能打”。

2021年,就在雷軍官宣進軍新能源汽車的數月之後,由其創立的順為資本領投路凱智行Pre-A輪融資。路凱智行是專注于礦山場景的無人駕駛企業,已實現L4級別無人駕駛的商業化落地。可以確定的是,小米汽車L2+級別的智慧駕駛和路凱智行L4級別無人駕駛,因為場景的不同將各自面臨不同的技術難點。單以無人駕駛技術而言,礦山場景下,無人駕駛在感知、定位、規劃、控制4個層面分別面臨不同的挑戰。
無人駕駛技術的挑戰
定位層面:當前的無人駕駛系統需要具備較高的定位精度和系統魯棒性。露天礦場景下信號傳播環境複雜,且作業環境動態變化,在傳統靜態RTK基站及4G\5G基站建設的基礎上,需增加補盲基站及移動基站以保證足夠的信號覆蓋;另一方面,高精地圖為無人駕駛系統提供定位基線,高精地圖需動態更新以適應採排環境的變化。
感知層面:礦山車輛運輸過程中或産生大量揚塵,須通過前置的信號處理方法過濾相關的干擾信號,且通過AI點雲數據聚類等演算法移除揚塵遮擋數據,從而降低對障礙物的誤識別;另一方面,相比較開放道路場景下車道線、交通標識信號燈等豐富的語義資訊,礦山場景下的環境感知演算法更多依賴對原始信號中的結構化資訊,從而構建出虛擬的環境語義;在感知融合方面,顛簸的路面容易造成感測器相對位置的偏移,需要通過線上數據標定保持空間對齊關係。
規劃層面:露天礦採排過程中採裝區域及排土區域隨著作業進程不斷變化,規划算法需具備足夠的自適應性以優化礦山車輛在採裝區域及排土區域的整體作業效率;在多場區多編組的混合作業場景中,需設計動態路口管控、區域管控等規划算法保障行車安全,並通過車鏟協同動態調度演算法優化優化系統整體運作效率。
控制層面:礦山內部的道路環境複雜多變,存在裝載和排土等不同的場景,需要無人駕駛系統能夠快速響應環境變化,做出精準控制,確保行駛安全和穩定。
為了解決礦山場景中感知方面的挑戰,路凱智行採用以下措施:多感測器融合:利用多種感測器,如鐳射雷達、攝像頭、毫米波雷達感測器等,對礦山無人駕駛運作場地周圍環境進行多角度、全方位的感知,通過融合多種感測器數據來提高感知精度和魯棒性。多演算法技術融合:採用傳統演算法和AI model融合演算法,通過場景數據的驅動,提高了對複雜環境的識別和感知能力。實時更新地圖:將感測器數據實時更新到地圖中,利用地圖對環境進行建模和分析,提高對環境的感知精度。同時,可以將地圖與實時數據相結合,實現更準確、更可靠的環境感知。對於定位挑戰,通過和合作夥伴一起努力,路凱智行制定了一套標準的基礎設施建設流程,確保4G\5G網路和RTK定位基站的穩定服務。另外在演算法層面,將多種定位技術相結合使用,如慣導,視覺, 鐳射雷達等,通過融合多種定位數據來提高定位精度和魯棒性。路徑規劃方面:根據場景挑選最合適的路徑規划算法,根據實際情況靈活規劃路徑。同時,還將路徑規劃與環境感知相結合,根據實時數據動態調整路徑規劃;控制策略方面:利用先進的控制策略,如模型預測控制,快速響應環境變化,做出正確的決策。同時,還可以利用實時數據更新控制策略,以適應環境變化。
AI大模型與安全策略
發佈會上,雷軍提出用AI語音大模型賦能小米汽車,提升控車能力和駕駛體驗。而實際上,路凱智行早已經將AI大模型引入礦山無人駕駛。視覺類的AI大模型方面,在AIGC概念提出之前,路凱智行的研發團隊已廣泛應用生成式神經網路(GAN)等技術手段增強圖像、點雲等感知數據集,用於對自動駕駛感知演算法進行演算法優化,提升演算法在更加通用的礦山場景下的準確性、魯棒性和穩定性,在路測的基礎上提供了低成本的演算法優化研發替代路徑。此外,類ChatGPT的語言類AI大模型方面,路凱智行已在相關領域佈局基礎模型和工具鏈的研發,並在礦山制度管理、低代碼數據分析等領域形成落地能力。在安全層面,小米汽車L2+級別的駕駛安全和路凱智行L4級別的生産安全,在不同維度對給自分別提出了要求。回歸到露天礦實際生産場景,路凱智行安全策略是從車輛安全、系統安全、功能安全3個維度來達成一個目標:無人駕駛系統異常情況下保障無人駕駛的運輸安全。
路凱智行的系統軟體全部使用ISO26262功能安全流程和規範進行正向設計和開發,第三方的配件也嚴格按照功能安全的ASIL等級要求規範。對於系統故障或系統異常場景,路凱智行有著明確的定義、評判標準和評判機制。對於系統故障或系統異常發生的原因、概率和危害性,路凱智行也建立了相應的處理機制。並通過系統備份、系統監測、增加系統冗余、優化軟體設計等方式來避免系統異常和系統故障的情況發生。
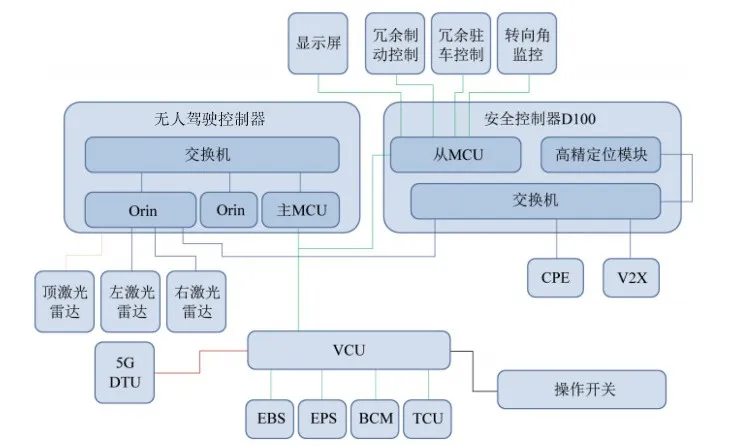
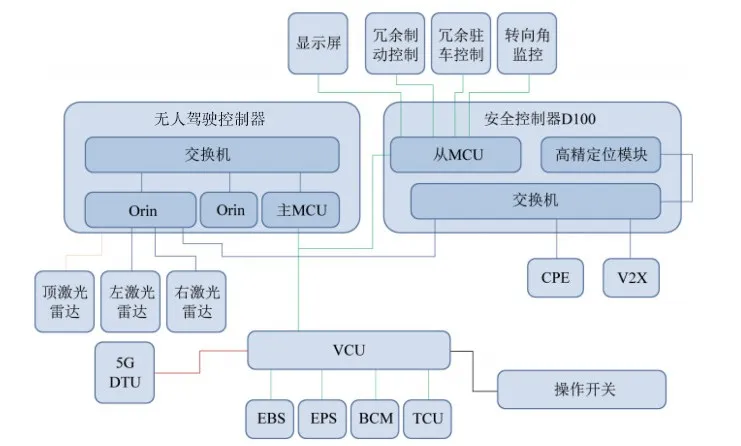
車輛方面,路凱智行的無人駕駛礦卡形成了以無人駕駛為核心的域集中式電氣架構:以VCU−ACU−SCU構成設備與設備控制,形成安全閉環;底盤線控化和安全冗余從感知、定位、通信和EE架構到車控部件均採用安全流程正向設計,且冗余控制和監控介面均獨立於主控系統,可在異常的情況下滿足運輸需求。正如雷軍所言,新能源汽車已經從電機化邁向智慧化。同樣,礦山無人駕駛也已經從“下安全員”變成了運營效率的競爭。在這一階段,考量的不再是無人駕駛技術,而是無人駕駛技術、AI大模型演算法、智慧礦山系統、生産調度管理等多種技術或者系統方案的融合應用。雷軍説,小米汽車力圖構建“人、車、家”合一的互聯生態,給予用戶非凡的生態體驗。這種構想和路凱智行從創立伊始就提出來的“懂車、懂礦、懂演算法”存在某種意義上的不謀而合。只不過,在礦山場景下,路凱智行將其定義為線控智慧整車、無人駕駛系統和智慧礦山系統的完美融合。
(推廣)
來源:信陽日報 | 撰稿:路凱智行 | 責編:谷晟 審核:張淵
![]() 新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
新聞投稿:184042016@qq.com 新聞熱線:135 8189 2583
中國網際網路視聽節目服務自律公約 | 網路110報警服務 | 12321垃圾資訊舉報中心 | 友情連結
版權所有 中國網際網路新聞中心 電話: 057187567897 京ICP證 040089號
網路傳播視聽節目許可證號:0105123 京公網安備110108006329號 京網文[2011]0252-085號

