①

②

③
④
圖① “海豚1”從山東煙臺蓬萊港首航。
圖② 哈爾濱工程大學自主研發的全景視覺感知系統。
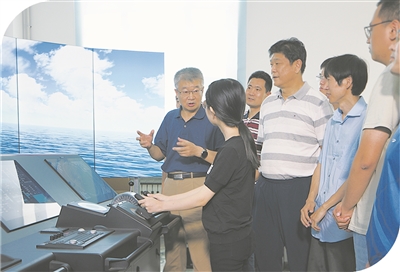
圖③ “海豚1”智慧駕控系統。
圖④ 研發團隊成員調試“海豚1”數字孿生系統。
郭健楠攝
【深瞳工作室出品】
浮球!平靜的航行被一陣預警聲打斷。“海豚1”的首航航線上出現了成片的浮球,浮球下方是一望無際的海産養殖場。
這讓中國首艘數字孿生智慧試驗船“海豚1”首航領隊、哈爾濱工程大學教授張智心裏咯噔一下:“海圖上並沒有標注出這裡有養殖場,怎麼辦?臨時繞路已經來不及,只能穿越這片‘暗礁’林立的迷亂之地。”
“繞開這些定位規律不明、確切坐標未知的浮球,它能做到嗎?”
這一問題在張智腦中一閃而過時,然而,“海豚1”上裝載的鐳射雷達、固態雷達、全景紅外視覺系統以及它百兆每秒的數據處理速度又讓張智覺著自己想多了。
憑藉超高配置和決策能力,“海豚1”僅用了很短時間就解決了首航中遇到的難題,巧渡“險灘”。
在10月12日召開的世界航海裝備大會上,哈爾濱工程大學展廳中展出的“海豚1”受到廣泛關注,當參觀者了解到該船在資訊融合、態勢感知、數字孿生等三個方面達到的智慧化水準時,忍不住嘖嘖稱讚。
由“海豚1”出征領航,中國智慧船舶高品質發展之路邁出了紮實一步。
讓船舶擁有“料事如神”的超能力
自2006年國際海事組織提出e-Navigation(電子航海)概念以來,歐美日韓等多個國家都開啟了大型計劃以提升船舶智慧化水準。
“隨著人工智慧、數字孿生等技術的深化應用,船舶智慧化已經遠遠超過了最初的‘資訊化’定義範疇。”黑龍江省“頭雁團隊”、哈爾濱工程大學數字與智慧技術創新團隊負責人夏桂華教授接受科技日報記者採訪時介紹,團隊研發的數字孿生智慧科研試驗船以“海豚”為名,是因為海豚是智慧的象徵。
“海豚1”不僅具備在2海裏內精確探測水面上0.5米高微小目標的過人之處,更獨特的是態勢智慧感知、超前預判等AI技術賦予了它“智慧”。
“在陸地上,智慧網聯汽車正在改變交通的安全性、能源的利用效率,正朝著智慧駕駛,甚至無人駕駛邁進。在海洋裏,智慧船舶的變革也在迎頭趕上。”夏桂華説。
“海豚1”開啟了未來智慧船舶打造“智慧眼、智慧耳、智慧腦”的先河,將在進一步完善後賦能中國船舶製造,為未來智慧船舶的主要系統和關鍵設備全自主技術能力的形成奠定堅實基礎。
“要實現這樣的跨越必須為‘海豚1’裝上真正的‘超級大腦’。”哈爾濱工程大學數字與智慧技術創新團隊技術負責人朱齊丹教授説。該團隊積累了豐富的智慧船舶設計製造建模、計算等研究成果,能通過實尺度船舶動力學建模、航行水動力性能倣真、動力系統倣真、風浪流場倣真等,為智慧船舶提供高精準資訊。“相當於可以在接近實船的環境中進行預先演練,賦予‘海豚1’預想、思考、研判的能力。”朱齊丹告訴記者。
為了做出這樣的模型,團隊收集了幾萬張、涵蓋多種場景的實船圖片,一張張地精確標注、整理分析,最終形成一個數據集,用於人工智慧的機器學習;在核心模組的支援下,“海豚1”能夠以每秒數百兆的速度實時採集、處理外來的多源資訊數據……
這些都讓“海豚1”能夠實時自主繞開障礙、規劃最優航線,仿佛一個可以應對未知世界的“神算子”。
“海豚1”有個“數字分身”
從外觀看,“海豚1”嬌小而普通。它僅有25米長,排水量也只有100噸。但它與其他船最大的區別是,在虛擬世界中有一個能為它預言的“數字孿生體”。
要知道,虛擬世界最大的優勢是試錯成本低。試想如果有一個虛擬人提前演繹了你生活中的缺憾,你在真實生活裏還會讓缺憾發生嗎?
研發團隊就為“海豚1”量身打造了這樣一條虛擬船。它們不僅可以同步航行,還可以預演航行。
“實體船停止了,虛擬船可以繼續航行。”張智説,這樣就可以為實船預判它接下來航行的策略,預判可能的危險,並試驗遇到這些危險狀況時該怎樣操縱,保證實船運作安全。
“我們希望將‘海豚1’的智慧‘複製’給萬千船舶。但又不能一個一個地教,船舶數字孿生整合軟體平臺及其應用系統的作用就是要像老師一樣‘傳道授業’。”夏桂華告訴記者,虛實交互的平臺為智慧船舶測試提供一個比現實環境更多變、更豐富的“演練場”。
未來,“海豚1”所依託的高效測試、驗證、運作、調度、管控平臺,或可應用於自主智慧船舶前期研發、中期測試、後期運營等,加快我國自主智慧船舶在可達海域的應用和部署步伐。
大海中的環境瞬息萬變,與船舶航行相關的因素何止萬千。如何才能構建一個涵蓋虛擬船、虛擬海洋、虛擬天氣環境等映射現實世界,且具有精準模擬功能的推演平臺呢?
夏桂華給出虛實交互的關鍵秘訣:“在數字孿生系統中,虛與實是動態辯證的關係,簡單概括就是‘從實到虛’‘從虛到實’,最後實現‘以虛控實’。”
遵循這一原則,團隊依據真實物理空間的船舶和其航行的海洋環境,構造出數字孿生船舶以及數字“賽博”海洋環境,並通過資訊和人工智慧技術,讓虛實之間實時交互聯通。
在“海豚1”的船艙裏、在黃島和哈爾濱的船舶遠端數字支援控制中心,都可以看到實時“海豚1”實時同步的“虛擬船”。它不僅對本體的機械結構、主機系統、感知系統、裝備部件以及管線電路系統等進行了數字再現,還與“海豚1”的感知系統、操控系統完全打通。
“虛擬船中的數字建模,可以對實體船進行遠端支援控制,實現智慧船舶的自主航行、自動靠離泊和自動避碰等作業環節。”張智説,“海豚1”的落地解決了基於數字孿生技術實現船舶遠端數字支援自主航行的關鍵問題,為未來基於遠端支援的智慧船舶和海洋工程裝備自主航行和作業提供基礎技術支撐。
兩次原始創新紮牢技術根基
“這並非一個全新的領域。”團隊系統首席蔡成濤教授説,工業數字化是新型工業化的一部分。世界各國在多年前就紛紛開啟了數字孿生智慧船舶的研製。例如,南韓2012年開始建造智慧船舶,以促進船舶的資訊化、自動化、智慧化以及綠色節能發展。
中國的選擇是:謀定而後動。
2015年,哈爾濱工程大學與中船集團702所共同牽頭,與多家船海學科技術優勢科研院所和高校協同攻關,研發全球第一座數值水池虛擬試驗系統V1.0,通過了中國船級社和法國BV船級社的國內、國際雙認證。
這是世界上首次實現的億級網格量的大規模高效並行計算,它能夠為船舶與海洋工程設計、試航和運作提供極為精細的水動力性能模擬。
“當時的潮流是數據驅動,就像會下圍棋的阿爾法狗,在一定的演算法支援下,通過海量數據集訓練産生固定任務中的‘智慧’。”張智説,但夏桂華沒有帶領團隊走這條路。
“數據很重要,但模型才是性能的魂。兩者相互磨合,才能在一定算力的基礎上實現高精度運算。”夏桂華説,要在船舶工業中落地應用的數字化系統必須滿足兩個條件:首先需要建立盡可能精準的模型,其次要通過數據驅動模型迭代升級。
毋庸諱言,資訊技術領域有一條不變的鐵律:惟有掌握代碼,才能決定迭代的節奏。
正因如此,當2019年智慧船舶與數字孿生技術的研究開始實施時,夏桂華再次選擇了源頭創新。
“我和夏老師曾經是有過爭論的。我覺得開源平臺上的架構、模型是很多人工智慧愛好者打磨出來的,已經足夠豐富和紮實了。夏老師卻堅持源頭創新。”張智説,回過頭看,做這樣的決定是有遠見的,作為工業數字化的基座,底層代碼服務於長遠發展、服務於國家戰略,必須牢固。
源頭創新的決定不僅扎牢了數字孿生技術這棵大樹的根基,也讓技術的應用“枝繁葉茂”。
“在船舶數字孿生技術方面,我們已經是船舶行業公認的‘領頭羊’。”張智説,如果當時抱著交差的思想做事情,團隊得不到歷練,而現在數字孿生系統裏的代碼是團隊一個一個敲出來的,團隊對其底層、內核的機理規律理解非常透徹。
未來遠端“代駕”將乘風破浪
一陣大風襲來,大浪隨之興起,一浪高過一浪。海平面上的環境剛剛還是晴空萬里、寧靜祥和,馬上變成波濤激蕩、暗流洶湧,船體跟著劇烈搖擺起來。
“在威海到乳山的航段風比較大,‘海豚1’劇烈橫搖,船上的研究人員幾乎都暈船了,躺著不敢動。”張智回憶起首航的經歷:儘管感到難受,但一點也不必擔心。因為,有“海豚1”的數字分身替船員輔助“代駕”。
目前“海豚1”是“四胞胎”,與它性能最相像的是船艙裏的那個數字孿生系統,能直接獲取“海豚1”的所有感知數據,成為船員開船的“最強輔助”。
而在距離海上千里之遙的哈爾濱工程大學61號樓、哈爾濱工程大學青島創新發展基地的智慧船舶遠端數字支援中心,由於受衛星數據傳輸和網路頻寬數據傳輸容量所限,尚只能傳輸少量數據,目前只能做到海況條件好的近岸遠端“代駕”,但在不久的將來,遠端“代駕”能駛出港灣真正做到“乘風破浪”。對此,團隊成員信心滿滿。
“未來,我們在智慧船舶態勢智慧感知系統的輔助下,即使不在現場也能準確把握周圍環境態勢,輕鬆駕船。”“海豚1”團隊成員劉志林教授説。團隊開發了綜合資訊融合軟體系統,能把全景視覺、鐳射雷達、固態雷達等硬體獲得的資訊,與電子海圖、北斗導航、實時衛星遙感等獲得的資訊融合到一起,進行分析、測算,同步構建數字海洋環境,實現船舶航行態勢智慧感知,指導船舶航行的遠端操控。
“海豚1”上的鐳射雷達帶有“嫦娥”月球探測器的基因。中國科學院上海技術物理研究所研發的鐳射雷達已成功應用在嫦娥3號、4號、5號月球探測器上。此次,他們為“海豚1”特製了一款鐳射雷達。中國科學院上海技術物理研究所主任黃庚華解釋道:“比起探測距離100米左右的航太鐳射雷達,船舶的鐳射雷達探測要求為4公里,這相當於要將探測指標提高40倍。”
而在“海豚1”首航當天遇到的養殖場“迷陣”,是靠另一種叫做“固態雷達”的設備定位標記、順利闖關的。北京海蘭信數據科技股份有限公司為“海豚1”研製固態雷達。該公司總師李常偉介紹,固態雷達對於雜波特性的抑制能力很高,能夠將養殖區一串一串的浮球清晰標記出來。
“海豚1”的視覺系統也分為紅外和可見光兩套。兩套360度全景視覺系統均由12路拼接高解析度攝像頭組成,可以通過嵌入式系統將採集到的船舶航行視覺資訊快速存儲,並快速計算合成一幅渾然一體的360度全景圖,回傳給遠端測控中心和船載航行感知系統。
高精度的傳感設備、實時的資訊傳輸、先進的演算法模型,將共同為未來的船舶描繪出顛覆性變革,遠端“代駕”或許只是其中的一個典型應用。
從鄭和七下西洋到哥倫布環球旅行,人類征服大海的步伐從未止步。“馭海之術”走入AI時代,人類有望在降低出海風險、減少能源消耗的同時獲得最大的運營效率。不止如此,在自學習、自適應、自進化等演算法的加持下,船舶自身各系統還能像智慧手機一樣不斷迭代和優化,隨時復現船舶系統任意時刻的狀態,推演或倣真未來時刻的“假設”場景,産生預判的應對策略。
開拓船舶智慧製造藍海
世界貿易運輸,90%靠海運。
船舶的設計製造創新性強、科技含量高,是船舶工業高品質發展引擎。
7月,我國自主研發設計建造、擁有自主智慧財産權的純電池動力集裝箱船N997輪首航。
9月,採用整合作業系統、覆蓋5G信號的我國首艘大型郵輪完成試航。
當前,綠色、智慧已成為船舶設計製造業轉型升級的主旋律。
“船舶不同於汽車等陸地運輸工具,其生産製造具有多品種、小批量、結構系統複雜的特點,因而標準化、模組化程度不高。數字化的系統可以彌補這一劣勢。”蔡成濤説,利用數字孿生技術,可以形成一些通用的軟體模組,如感知、決策、控制、環境等,大大促進智慧船舶的模組化“柔性定制”組裝,加速推動船舶智慧技術的快速發展。
AI時代的船舶設計製造行業如何實現轉型升級?新型船舶如何高效地完成安全性、穩定性等各類性能驗證?
“‘海豚1’就是要為中國船舶智慧技術的發展建起一座流動的海上實驗室,以加速我國船舶智慧技術的迭代進程。”夏桂華説,“海豚1”上可以搭載各種智慧系統,通過數據積累、模型分析,為未來智慧船舶的設計提供高效優化的方案。
“‘海豚1’船艙各處都配備了接通實驗設備的介面,設有製作實驗工具的必要器具。”劉志林介紹,這艘船是一個開放的系統,採用模組化設計,所有內部系統都留有介面,以滿足船舶與海洋技術裝備的實驗需求。
在這個“流動實驗室”的支撐下,團隊順利完成了智慧船舶自主航行、遠端遙控、多尺度多模態智慧船舶感知等一系列智慧船舶關鍵技術的示範驗證,未來還將為船舶工業軟體的自主研發提供實船試驗驗證條件。
哈爾濱工程大學正在聯合行業優勢單位,共同成立智慧航行設備的行業聯盟。未來聯盟內的成員單位都可以利用“海豚1”進行實驗,積極推動智慧船舶産業發展。
“數字化是智慧化的基礎,工業軟體是實現數字化的手段,船舶數字與智慧控制是未來船舶發展的主要方向。”夏桂華表示,包括綠色化、智慧化等多個關鍵核心技術的船舶設計升級,不僅可以開拓我國船舶製造業發展的新藍海,還能在國際船舶製造市場上展現綠色智慧高端船型“中國創造”的風采。
採 寫:記者 張佳星 李麗雲
通 訊 員 霍 萍
策 劃:趙英淑 林莉君 滕繼濮